
You’ll learn what a SCARA robot is, why it’s brutally fast at certain tasks, where it hits hard limits, and how to choose one without paying tuition in “unexpected” redesigns. You’ll get a practical checklist and a simple Fit Score so the decision is based on facts, not folklore.
Quick definition (snippet-ready)
A SCARA robot (Selective Compliance Assembly Robot Arm) is an industrial robot designed for fast horizontal (X–Y) motion with a vertical Z stroke, ideal for pick-and-place and small-part assembly with simple orientation needs.
Who this is for (and what it’s not for)
This is for engineers, integrators, ops, and buyers who need decision-grade selection logic. It’s not for complex 3D orientation, heavy payloads with long tools, or obstacle-heavy routing that needs full articulation.
What Is a SCARA Robot?
SCARA meaning (acronym) and the “selective compliance” idea
SCARA stands for Selective Compliance Assembly Robot Arm. “Selective compliance” means it can be slightly compliant in X–Y while staying stiff in Z.
That helps insertion tasks tolerate small misalignments instead of binding, especially when fixtures, parts, and reality don’t line up perfectly.
What makes SCARA different from other industrial robot arms
A SCARA robot arm is built for fast, repeatable planar motion plus a straight Z-axis approach. It’s not trying to be a contortionist; it’s trying to be a high-speed metronome.
SCARA robot vs SCARA robot arm (terminology you’ll see from vendors)
You’ll see “SCARA robot” and “SCARA robot arm” used interchangeably. Usually, “arm” is the mechanics, while the “system” includes controller, safety, tooling, IO, and integration.
How a SCARA Robot Works
Axes and kinematics (typical 4-axis layout)
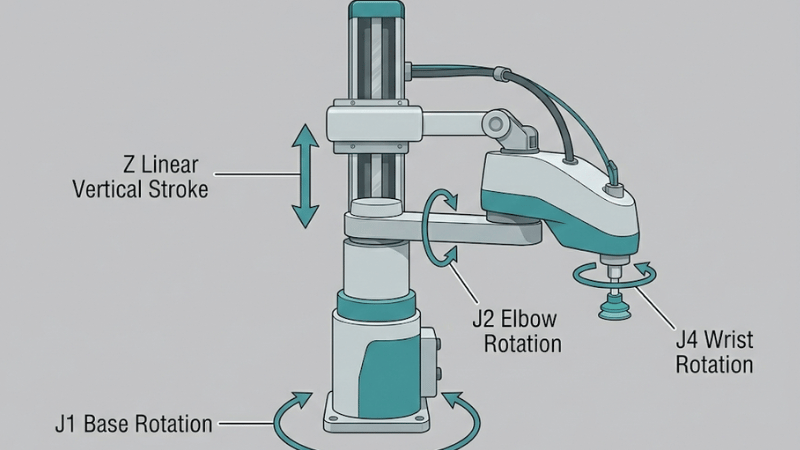
Most SCARAs are a 4-axis robot:
- J1 base rotation
- J2 elbow rotation
- Z linear stroke
- J4 wrist rotation
That layout is why SCARA excels as a pick and place robot for fast planar transfers plus consistent vertical placement.
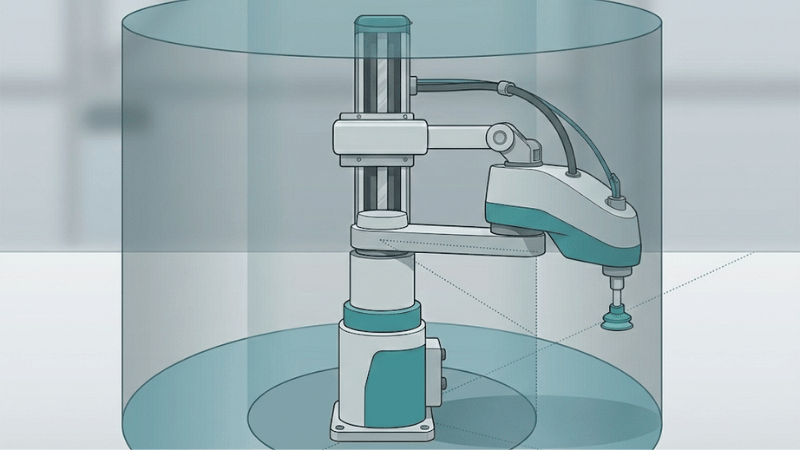
Motion behavior and work envelope
A SCARA’s work envelope is typically circular/cylindrical, like a donut around the base with a Z stroke. The “usable” envelope is often smaller once you add real tooling, cable routing, and fixture clearance.
Why SCARA is fast (and where it trades flexibility)
SCARA is fast because it’s optimized for short planar paths with fewer degrees of freedom than a 6-axis arm. The trade is limited orientation freedom, so complex multi-angle handling usually pushes you toward 6-axis.
Common mounting orientations
Common mounts include tabletop/pedestal, overhead, and wall. Choose based on part flow, guarding, and maintenance access, not just “where it fits in CAD.”
What SCARA Robots Are Used For
Best-fit tasks (where SCARA usually wins)
SCARA typically wins for:
- High-speed pick-and-place
- Small-part assembly and insertion
- Packaging, kitting, sorting
- Light machine tending
- Dispensing and light screwdriving (within force/moment limits)
If your motion is mostly X–Y plus a clean Z placement, SCARA robot is often the most efficient choice.
Best-fit industries
Common fits include electronics, medical devices (rating-dependent), consumer goods, and food/packaging (application-dependent).
“Not a fit” tasks (red flags)
Red flags include complex 3D paths, frequent reorientation, large reach with heavy payload, obstacle-heavy routing, and long offset tools that create big moments.
SCARA Robot Advantages and Disadvantages
Advantages (what you’re really buying)
You’re buying throughput and consistency on planar work:
- Faster cycle time / takt time for short planar moves
- Strong repeatability for insertion-style assembly
- Compact footprint and simpler motion planning
- Often simpler programming than 6-axis for planar point-to-point
Disadvantages / limitations (what can break your project)
Common limits:
- Limited orientation control vs 6-axis
- Circular envelope can clash with rectangular layouts
- Tight payload and moment limits with long tools
- Poor fit for complex 3D trajectories
Trade-offs in one table (fast comparison)
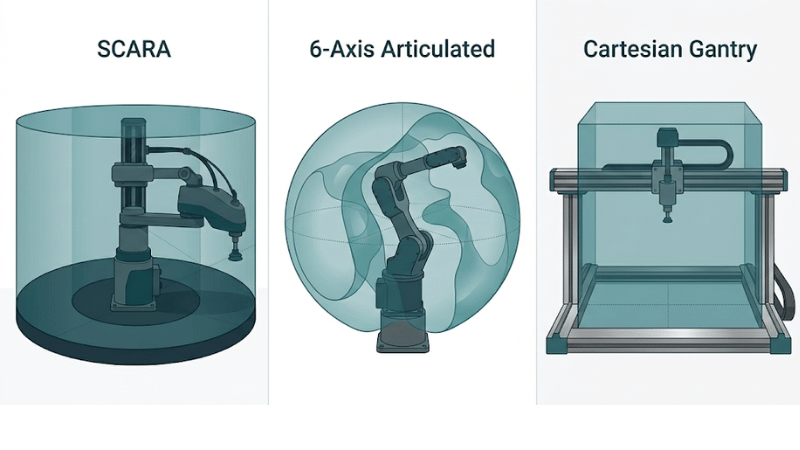
| Robot Type | Best At | Workspace Shape | Big Strength | Common Constraint |
|---|---|---|---|---|
| SCARA | Fast planar pick/place + insertion | Circular/cylindrical | Speed + repeatability | Limited orientation |
| 6-axis | 3D paths + orientation freedom | Irregular | Flexibility | Complexity + cycle time |
| Cartesian | Long linear travel | Rectangular | Stiff + predictable | Bigger footprint |
| Delta | Ultra-fast small pick/place | Dome/limited | Peak speed | Payload limits |
SCARA vs 6-Axis vs Cartesian
If/then decision rules (quick chooser)
- Need fast planar motion + vertical placement → SCARA
- Need 3D avoidance and orientation freedom → 6-axis
- Need long travel in a box-shaped space → Cartesian
These rules won’t replace testing, but they will prevent wildly mismatched robot choices.
Workspace shape and cell layout implications
SCARA’s circular reach fits “robot in the middle, stations around it.” Cartesian fits rectangular travel and long conveyors. Layout shape alone can eliminate options quickly.
Typical performance considerations
Real cycle time depends on path distance, settling time, payload/tool weight, vacuum response, and feeder/vision timing. The robot is often waiting on the process, not the other way around.
Integration implications
SCARA can be simpler to program for planar tasks, but integration still hinges on stable part presentation, safety design, and service access you won’t regret later.
How to Choose a SCARA Robot Arm
Start with the task spec (what to write down before calling vendors)
Document the basics: part size/weight, pick/place points, approach clearance, orientation needs, tolerances, insertion forces, reject handling, takt target, and how parts are presented (tray, conveyor, feeder, vision).
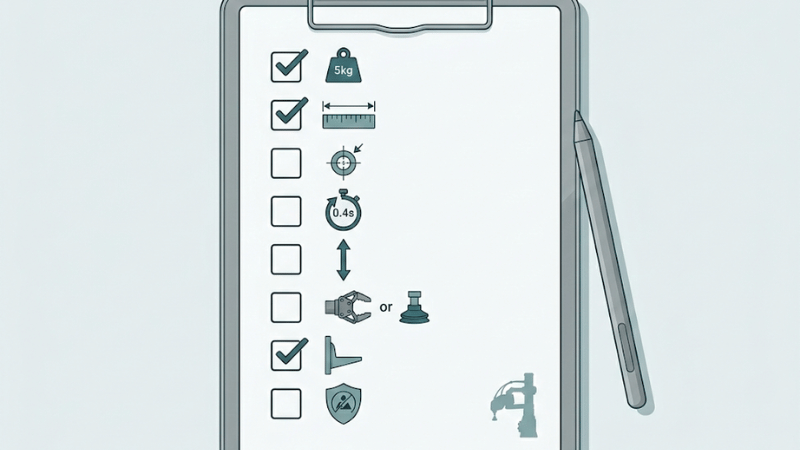
The 9 specs that matter most (selection checklist)
- Payload including tool, cables, fittings, parts
- Reach and usable work envelope
- Repeatability and how it’s defined
- Cycle time model (distance, path type, settle criteria)
- Z stroke and approach clearance
- Wrist rotation and cable management
- Mounting, footprint, service access
- Environment (ESD, cleanroom, washdown, temperature)
- Controller/I/O and comms protocols
End-effector reality check (common mismatch)
Tooling is where “small changes” turn into big consequences. Watch for tool weight creep, vacuum hardware mass and lag, offset loads increasing moments, and compliance devices changing dynamics.
Integration & ecosystem questions
Confirm vision workflow, conveyor tracking, feeder integration, and simulation/offline programming options early. These choices often decide throughput more than the robot’s headline specs.
Decision Framework: SCARA Fit Score
A simple scoring rubric (0–100) to avoid “gut feel” choices
Score your application:
- Speed/takt fit (0–25)
- Workspace fit (0–20)
- Orientation/DOF fit (0–20)
- Payload & tooling margin (0–15)
- Integration complexity (0–10)
- Environment & compliance needs (0–10)
Pass/fail gates (hard constraints)
Fail SCARA early if you can’t meet required orientation, clearance/approach geometry, payload and moment limits with margin, or reach geometry at real speed with real tooling.
Example scoring walkthrough (mini scenario)
Electronics pick-and-place usually scores high for SCARA robot. Machine tending with multi-angle orientation often fails DOF gates and shifts toward 6-axis.
Real-World Notes From SCARA Projects
What I learned after commissioning a high-speed SCARA cell
Catalog cycle times are best-case. Real bottlenecks are settling time (fixtures matter), cable wear points at high cycles, and feeder/vision tuning that becomes the true limiter.
Field checklist before FAT/SAT
Before sign-off: verify fixture datums and tolerance stack-up, validate part presentation stability, add vacuum loss detection and reject handling, and confirm recovery logic for mis-picks and jams.
Lessons that reduce downtime in the first 90 days
Plan spares, PM based on cycles, operator recovery training, and error-proofing. It’s less glamorous than “faster robot,” but it wins in production.
Common Pitfalls (and How to Fix Them)
Underestimating payload (tooling + inertia + moment)
Don’t spec from payload alone. Inertia and moments often limit performance first. Model tooling early and keep margin for revisions.
Misreading the work envelope
“It reaches” is not “it reaches reliably at speed.” Validate approach angles, Z clearance, and worst-case points with the actual tool.
Ignoring part presentation variability
If parts wander, your robot will pick air with impressive consistency. Stabilize feeding, add vision where needed, and verify upstream capability.
Designing the cell around the robot instead of the process
Robot-first layouts often punish maintenance access and guarding. Design around process flow, operator access, and safety zones first.
Cost, Timeline, and ROI Reality Check
Typical project timeline (from concept to production)
A typical flow:
spec/discovery → design/simulation → build → FAT → install → SAT → ramp
Cost drivers you should budget for (beyond the robot)
Budget for end effector, vision/lighting, feeders, guarding and safety controls, and integration engineering hours. The arm is often not the biggest line item.
ROI model inputs (what ops/procurement will ask)
Be ready with cycle time and uptime assumptions, labor offsets, scrap/rework reduction, and changeover time. If you can’t quantify it, ROI will feel like a debate club.
What Competitor Articles Usually Miss (and What You’ll Learn Here)
Decision-grade selection, not just definitions
Many articles stop at “SCARA is fast.” Here you get Fit Score logic plus pass/fail gates, so the choice survives both engineering review and procurement scrutiny.
The “spec that bites you later” list
The usual culprits are usable work envelope, tooling moments, settling time, and cable management. Catch them early and your project stays pleasantly boring.
Implementation reality
Feeding, vision, and safety integration often decide real throughput more than the robot itself. Treat the cell as a system, not a single component.
Trust Notes, Assumptions, and When Not to Use This Advice
Assumptions
Assumes repeatable parts, a defined takt time, and stable part presentation (or a plan to stabilize it).
Limitations
Vendor specs vary and must be validated through simulation, time studies, or a pilot. Safety requires formal risk assessment and engineered safeguards.
Who this guide is for / isn’t for
Great for high-speed planar automation. Not a fit for complex 3D orientation work or heavy handling with long offset tools.
Author credibility block (suggestion to include)
What to write in the author bio
Include years in automation, number of cells commissioned, industries served, and toolchain familiarity (PLC, vision, simulation).
Proof elements to add
Add non-sensitive photos, a commissioning checklist, and anonymized metrics like cycle time and uptime.
Conclusion
SCARA robots excel at fast planar motion with consistent Z placement, making them a strong fit for pick-and-place and small-part assembly when takt time is tight.
Most failures come from missed basics: usable work envelope, orientation limits, and payload/moment margin with the real end effector. Score the fit early and validate with simulation or a pilot to avoid late surprises.
Take the Next Step
Repeatable SCARA Cycle Times, Not Guesswork
When throughput and uptime matter, don’t rely on “close enough.” A correctly spec’d SCARA robot setup keeps repeatability, cycle time, and end-effector performance consistent—so results stay stable shift to shift.
➡️ Visit Our Website to Explore Custom SCARA Automation Solutions
Talk to People Who Plan for Real-World Conditions
We’ll match your payload and reach, usable work envelope, takt time, mounting, environment, and controller/I/O needs to the right SCARA robot arm setup—plus a spares and inspection-friendly plan that cuts rework, downtime, and surprises.
➡️ Submit an Inquiry & Your Project Details Today
Frequently Asked Questions
1) What is a SCARA robot used for?
A SCARA robot is used for high-speed pick-and-place, small-part assembly/insertion, packaging/kitting, and other work that needs fast X–Y moves plus reliable Z placement.
2) What are the advantages and disadvantages of a SCARA robot?
Advantages include speed, repeatability, and a compact footprint. Disadvantages include limited orientation freedom and envelope/payload-moment constraints that can block certain applications.
3) How do I know if I should choose SCARA vs a 6-axis or Cartesian robot?
Choose SCARA for fast planar motion, 6-axis for complex 3D orientation and avoidance, and Cartesian for long linear travel with a rectangular workspace.


{kind=link}